Pipeline
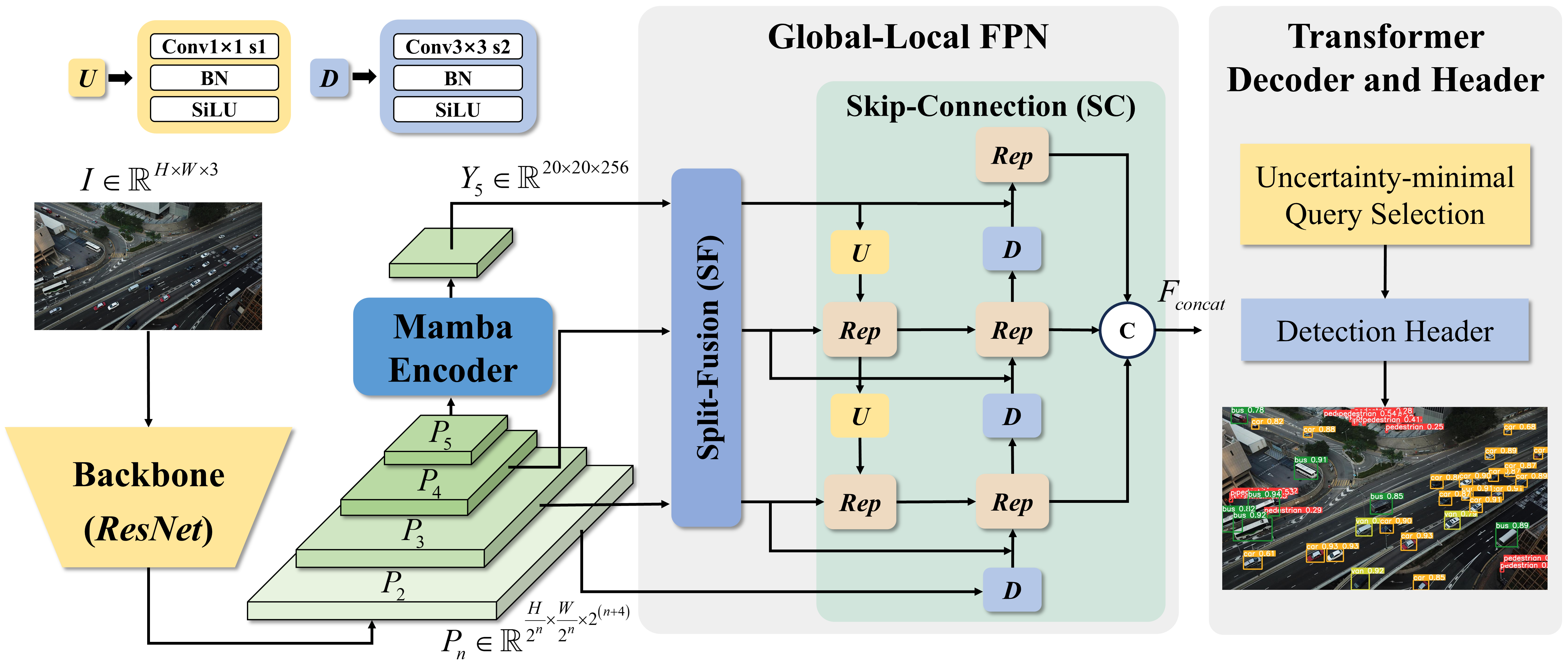
The overall structure of State Space Model-based object Detector (SSM-Det), that is mainly composed of Backbone, Direction-aware Visual State-Space Encoder (D-VSSE), Split-Fusion (SF), Skip-Connection (SC), Transformer Decoder and Header. After feature extraction, D-VSSE performs the long-term dependency modeling at the expense of linear complexity, and SF-SC fuses multi-scale representations for cross-layer information interaction. Finally, Transformer Decoder adopts Uncertainty-minimal Query Selection and Detection Header for high-quality box prediction. The U, D and Rep mark Up-sampled, Down-sampled convolution and Re-parametrization.